Image humanoid built of joint modules modified with the help of dimension mechanics. Compact and powerful joint modules consisting of encoders, motor, eccentric gear and worm gear. Human try to self-actualize in automation and robotic. The mechanics of a robotic hand presented here gets us closer to that. It is shown that skilled application of innovative gearing technologies can bring a robotic hand and even a complete humanoid very close to a human’s motivity, statics and dynamic. For this the basic element a robot consists of, the joint module, is significantly improved mechanically! Hence a complete humanoid can be built with this basic element applying skilled variance and dimension mechanics.
Various Mechanical Designs
Experience and Competence
Fair Price-Performance Ratio
Experience and Competence
Fair Price-Performance Ratio

Phone: 0049 2405 408 16 50
Robotic hand

Compact and powerful joint modules consisting of encoders, motor, eccentric gear and worm gear.
Animation of the powerful joint module.
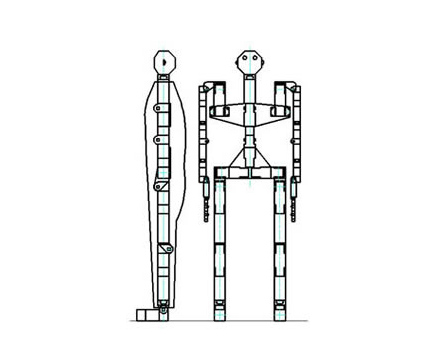
Image humanoid built of joint modules modified with the help of dimension mechanics.
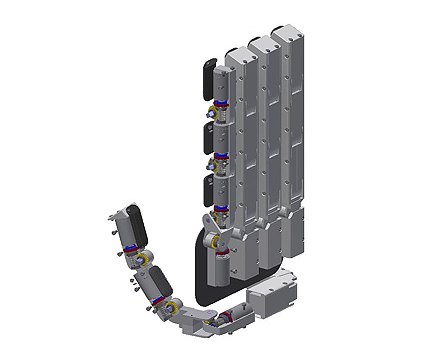
Side view of the Robotic hand.

Do you have questions or would like to get further information?
We’re glad to help you. Feel free to contact us
via e-mail or phone 0049 2405 408 1650.

Applied for patent
This product has been patented.